Einführung in das Arbeiten mit dem Knickarmroboter ABB IRB120
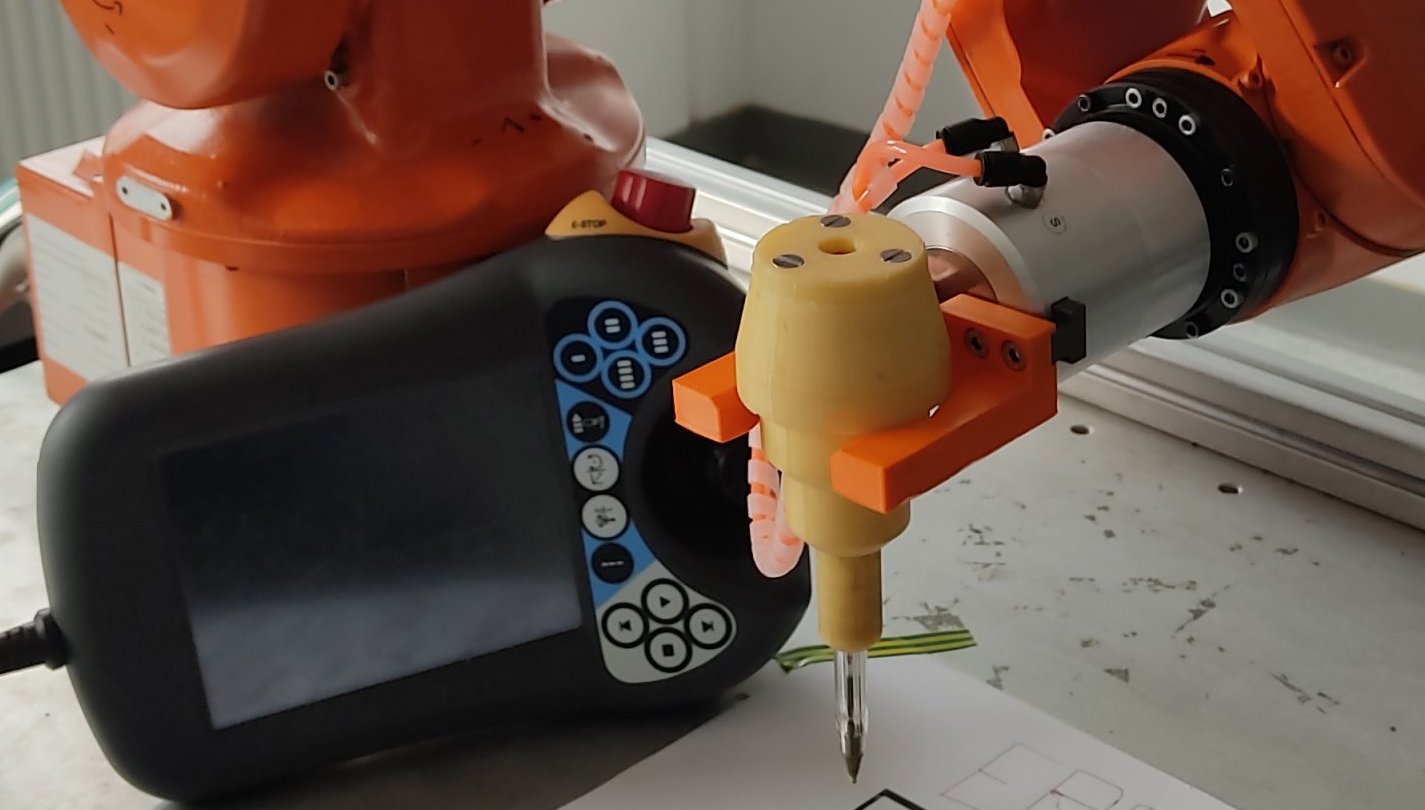
Für die ersten Gehversuche mit einem Knickarmroboter werden gerne Kugelschreiber in geeigneten Halterungen für Robotergreifer und ausgedruckte Labyrinthe verwendet.
Unsere Studierende lernen so die wichtgsten Begriffe, die verschiedenen Koordinatensysteme und die unterschiedlichen Betriebsarten eines Knickarmroboters kennen. Nach dem händischen Verfahren des Roboters wird das Durchfahren des Labyrinths natürlich auch programmiert.
Die zu erlernenden Kompetenzen sind:
- Manuelles Bewegen des Roboters in verschiedenen Koordinatensystemen
- Programmierung eines Werkzeug- und Werkstückkoordinatensystems
- Programmierung des Verfahrweges in der Programmiersprache ABB-Rapid
Der Zeitaufwand für diese Aufgabenstellung beträgt etwa 6 Unterrichtseinheiten.
Comments are closed